Mikrocontroller-Systeme auf der Basis von Raspberry Pi, OrangePi und ähnlichen benutzen meistens ein Linux-/Unix-ähnliches Multiuser Multicore Betriebssystem, das gleichzeitig die Bearbeitung mehrerer Aufgaben ermöglicht mit Leistungsfähigkeiten, die denen von PCs vor nicht allzu vielen Jahren entspricht. Für kleinere Mess- und Steuerungsaufgaben, vor allem, wenn ein konkretes Timing im Programm gefordert ist, wird es aber schnell kompliziert.
Als kostengünstige Alternative haben sich Rechnerboards mit ESP32 und RP2040 CPUs etabliert. Sie haben RAM und Programm- und Datenspeicher bereits an Board, ebenso eine WLan-Schnittstelle. Mit der dafür entwickelten Programmiersprache micropython benötigt man kaum spezielle Entwicklungswerkzeuge, um damit Microcontroller-Systeme schnell zu entwickeln. Immerhin arbeiten sie mit sparsamen 32-Bit Ein- oder Zweikern-CPUs bei Taktraten von 133 – 240 Mhz und benötigen Strom von weniger als 1A.
Integriert in den Kern dieser neuen Systeme ist neben den Speichern eine Vielzahl von intelligenten Schnittstellen wie I2C, 1-Wire, SPI, I2S, Seriell und andere, so dass man oft ohne weitere Peripheriebausteine auskommt. Einfach 5 Volt bereitstellen und schon geht die Lösung der Aufgabe in der Software los.

Mit dem USB-Kabel zum Entwicklungs-Laptop oder -PC kann das Prototyp-Bord bereits mit Strom versorgt werden. Sonst tut es auch ein Handy-Ladegerät oder die Einspeisung von 5-6 Volt /1A in die 5V-Leitung des Moduls.
Auf dem oben gezeigten Prototyp-Board mit einer ESP32 CPU sind bereits die Funktionen für oLED-Anzeige, EEPROM-Speicher, SDCard-Speicher, U/S-Entfernungsmesser, 1-Wire-Interface und zwei isolierte TRIAC-Leistungsschalter 230V/6A aufgebaut.
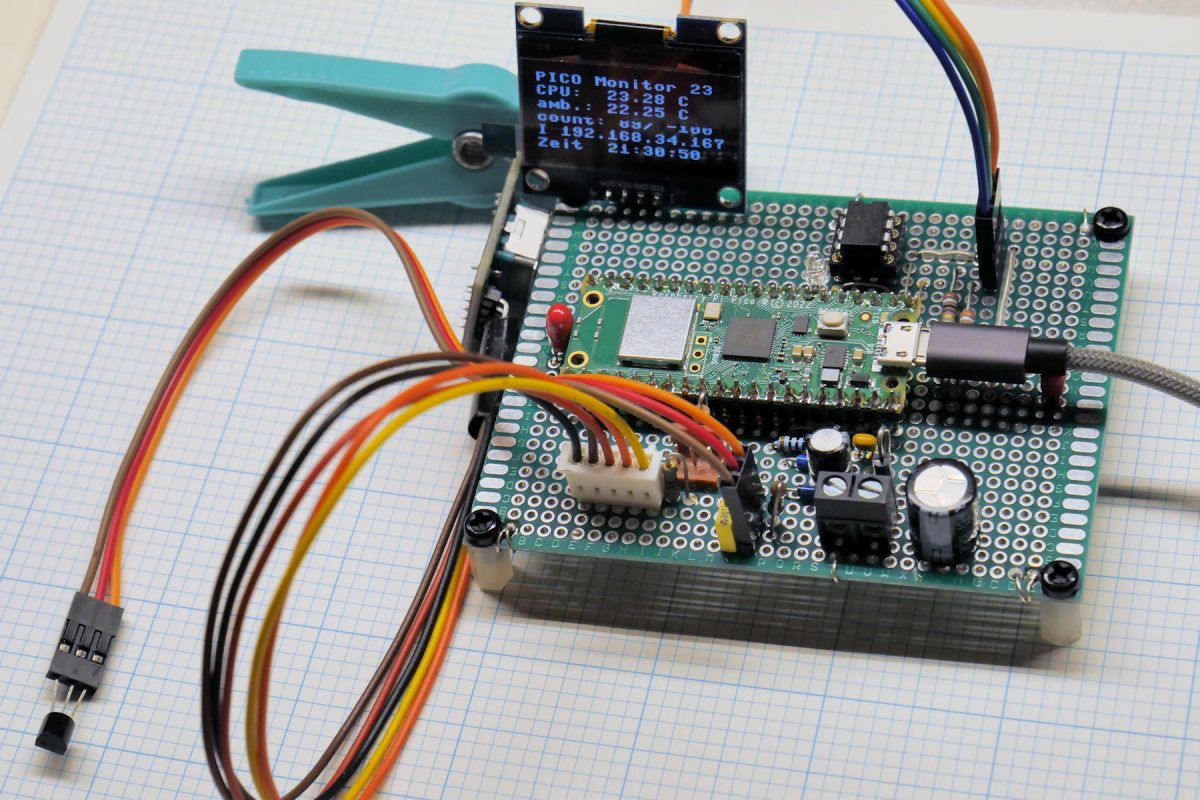
Sehr ähnlich ist ein Aufbau mit dem RPi-pico. Mit der maximalen Taktfrequenz von 133 MHz ist die Programm-Ausführung etwas langsamer, der Speicher etwa halb so groß wie beim ESP32. Bei Benutzung von micropython ist die Funktionssoftware zum großen Teil austauschbar. Auf dem Board sind die Funktionen für eine oLED-Anzeige, 1-wire-Interface, EEPROM-Speicher, digitaler Drehschalter und DCF77-Interface aufgebaut.
Diese Rechnermodule können nur eine Aufgabe zur Zeit ausführen. Auf Umwegen lässt sich in der Software aber ein „Scheduler“ einrichten, der Aufgaben zu vorgegebenen Zeiten starten kann.
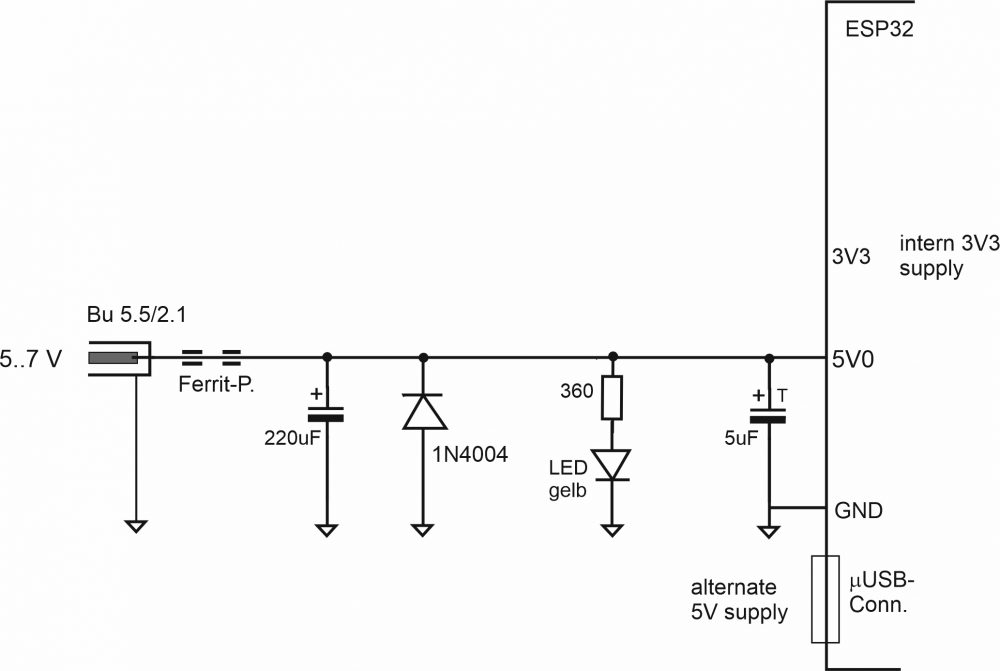
Beide Rechnermodule werden mit 5V versorgt und enthalten einen internen Spannungsregler, der die intern genutzten 3.3V erzeugt. Darum ist die Genauigkeit der 5V-Spannung nicht so wichtig. Die Module werden beim Programmieren und Testen über die USB-Schnittstelle versorgt, im Betrieb möglich auch über einen Anschluss an den 5V-Pin. Auf Verpolung ist die Reaktion sehr ungnädig, daher die Schutzdiode.